跟踪对人机工作交互的信任
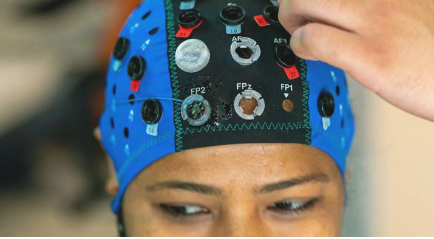
RanjanaMehta博士实验室的研究人员在操作员与机器人一起完成制造任务时捕获功能性大脑活动,以跟踪操作员的信任或不信任程度。学分:德克萨斯A&M工程
工作的未来就在这里。
随着各行各业开始看到人类与机器人密切合作,有必要确保这种关系是有效、顺畅和对人类有益的。机器人的可信赖性和人类信任机器人行为的意愿对于这种工作关系至关重要。然而,由于主观性,捕捉人类信任水平可能很困难,这是德克萨斯A&M大学WmMichaelBarnes'64工业和系统工程系的研究人员旨在解决的挑战。
神经人体工程学实验室副教授兼主任RanjanaMehta博士说,她实验室的人机自主信任研究源于一系列关于安全关键工作领域中人机交互的项目。
“虽然到目前为止我们的重点是了解操作员的疲劳和压力状态如何影响人类与机器人的交互方式,但信任成为研究的重要结构,”梅塔说。“我们发现,当人类感到疲倦时,他们会放松警惕,变得对自动化更加信任。然而,为什么会这样成为一个需要解决的重要问题。”
Mehta的最新工作最近发表在HumanFactors:TheJournaloftheHumanFactorsandErgonomicsSociety上,着重于了解操作员的信任行为为何以及如何受到人和机器人因素的影响的大脑-行为关系。
Mehta还在《应用人体工程学》杂志上发表了另一篇文章,研究了这些人类和机器人因素。
使用功能性近红外光谱,Mehta的实验室在操作员与机器人合作完成制造任务时捕获了功能性大脑活动。他们发现错误的机器人动作会降低操作员对机器人的信任。
这种不信任与额叶、运动和视觉皮层区域的激活增加有关,表明工作量增加和情境意识增强。有趣的是,同样的不信任行为与这些一起工作的大脑区域的解耦有关,否则当机器人表现可靠时,这些区域会很好地连接。Mehta说,这种脱钩在更高的机器人自主水平下更大,这表明信任的神经特征受到人类自主合作动态的影响。
“我们发现最有趣的是,当我们比较可靠性条件下的大脑激活数据(使用正常和错误的机器人行为进行操作)与机器人中操作员的信任水平(通过调查收集)时,神经特征会有所不同,”Mehta说。
“这强调了理解和衡量人机协作中信任的大脑行为关系的重要性,因为仅对信任的感知并不能说明操作员的信任行为是如何形成的。”
这两篇论文的主要作者、最近的工业工程博士生SarahHopko博士说,神经反应和对信任的感知都是信任和不信任行为的症状,并传递了有关如何通过不同的机器人行为建立、破坏和修复信任的不同信息。她强调了多模态信任指标的优势——神经活动、眼动追踪、行为分析等——可以揭示仅凭主观反应无法提供的新视角。
下一步是将研究扩展到不同的工作环境,例如应急响应,并了解多人类机器人团队的信任如何影响安全关键环境中的团队合作和任务工作。Mehta说,长期目标不是用自主机器人取代人类,而是通过开发具有信任意识的自主代理来支持他们。
“这项工作至关重要,我们有动力确保人类在环机器人设计、评估和集成到工作场所能够支持和增强人类能力,”梅塔说。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!