使用机器学习训练ArduinoUNOR4驱动的机器人
如果您有兴趣了解有关使用机器学习技术和技术训练机器人的更多信息,您可能会对新的Arduino项目感兴趣,以确定基本机器人是否可以仅使用LiDAR进行导航,而不是使用资源密集型计算机视觉技术。
LiDAR(即光探测和测距)是一种利用脉冲激光形式的光来测量距离的遥感方法。这项技术在自动驾驶汽车和机器人领域越来越受到关注,该项目旨在进一步突破其界限,并由YouTuberNikodemBartnik通过配备LiDAR的移动机器人进行了演示。
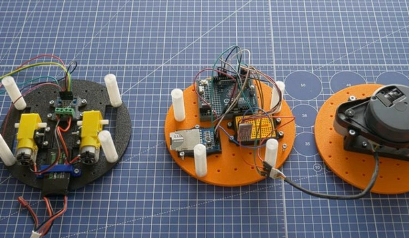
该机器人的硬件是根据开放机器人平台(ORP)规则构建的。其中包括两个直流电机、一个UNOR4Minima、一个蓝牙模块和一个SD卡。遵守ORP规则确保机器人构建在促进开源硬件和软件的平台上,从而促进机器人社区的创新和协作。
机器人机器学习
巴特尼克训练机器人的方法一丝不苟且富有创新性。他通过手动驱动机器人完成一系列课程,从旋转的激光雷达传感器收集了点云。然后导入该数据并进行转换以缩小分类模型。这个数据收集和转换的过程对于训练机器人识别和导航障碍至关重要。
基本概念涉及将机器学习算法集成到机器人系统中,使它们能够适应不同的教育需求和环境。这些机器人可以被设计来执行诸如辅导特定科目、协助动手实验或促进小组活动等任务。重要的是,机器学习的适应性使这些机器人能够从学生的互动中学习,从而不断提高其教育效果。
训练过程通常包括数据收集、模型选择和迭代细化。最初,机器人使用数据集进行训练,其中可能包括学生反应、面部表情或其他交互指标。决策树、神经网络或强化学习等算法可用于构建模型。然后将经过训练的模型部署到机器人中,机器人开始与学生互动。反馈循环在这里至关重要:当机器人与学生互动时,会收集新数据并用于更新模型,从而实现持续改进的循环。
工作流程通常包括以下阶段:数据收集、数据预处理、模型选择、训练、评估和部署。
数据收集:第一步是收集机器学习算法可以学习的数据。这些数据可以来自各种来源,例如机器人上的传感器、人机交互,甚至模拟环境。收集的数据类型取决于机器人设计要执行的任务。例如,如果机器人正在接受物体识别训练,您可能会从不同角度和照明条件收集物体的图像。
数据预处理:原始数据通常需要经过清理和转换才能有用。这可能涉及标准化传感器读数、注释图像或分割时间序列数据。目标是以一种使机器学习算法更容易识别模式的方式准备数据。
模型选择:下一步是选择合适的机器学习算法。选择取决于问题的性质、数据类型和可用的计算资源。算法的范围可以从线性回归和决策树等简单方法到神经网络或强化学习算法等复杂方法。
训练:选择模型后,实际的训练过程就开始了。该算法使用处理后的数据来调整其内部参数。对于监督学习任务,模型学习根据训练数据将输入(特征)映射到输出(标签)。在无监督任务中,模型尝试学习数据的底层结构。在强化学习的情况下,机器人通过与环境交互并接受奖励或惩罚来学习。
评估:训练后,使用之前未见过的单独数据集(称为验证集或测试集)评估模型的性能。准确度、精确度和召回率等指标通常用于量化模型的有效性。
部署:模型经过训练和评估后,就会集成到机器人的控制系统中。这使得机器人能够根据学习的模式做出决策、执行任务或与人类或其他系统交互。
迭代细化:当机器人在现实世界中运行时,可以收集额外的数据来进一步细化和更新机器学习模型,使机器人能够随着时间的推移适应新的条件或任务。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【别克昂科拉车质量怎么样别克昂科拉发动机怎么样】别克昂科拉作为一款紧凑型SUV,自上市以来在市场上获得了不...浏览全文>>
-
【别克昂科拉车质量怎么样】作为一款紧凑型SUV,别克昂科拉自上市以来在市场上获得了不少消费者的关注。它凭借...浏览全文>>
-
【别克昂科拉报价在哪个区间比较合理】在考虑购买别克昂科拉时,消费者最关心的问题之一就是“这款车的报价在...浏览全文>>
-
【别克昂科拉报价】作为一款紧凑型SUV,别克昂科拉凭借其时尚的外观、实用的空间以及良好的品牌口碑,受到不少...浏览全文>>
-
【别克昂科拉sport是什么意思别克昂科拉百公里】一、“别克昂科拉Sport”是别克品牌旗下一款紧凑型SUV——昂科...浏览全文>>
-
【别克昂科拉GX怎么样】作为一款主打城市SUV市场的车型,别克昂科拉GX自上市以来就受到了不少消费者的关注。它...浏览全文>>
-
【别克昂科拉gx评价】作为一款紧凑型SUV,别克昂科拉GX自上市以来在市场上获得了不少关注。它以美系品牌背景、...浏览全文>>
-
【别克昂科拉gx六大缺点】在选择一款SUV时,消费者往往会关注车辆的性能、配置、舒适性以及后期使用成本。别克...浏览全文>>
-
【别克gl8商务车怎么样】别克GL8自推出以来,凭借其出色的舒适性、空间表现和品牌口碑,成为国内高端商务用车...浏览全文>>
-
【别克gl8商务车油耗是多少】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验和较高的...浏览全文>>