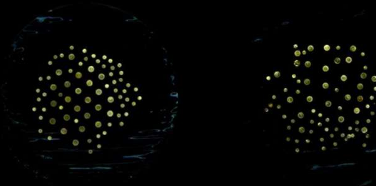
成群结队的微型机器人自组织成不同的模式
康奈尔大学和马克斯普朗克智能系统研究所之间的一项研究合作找到了一种有效的方法来扩展集群微型机器人的集体行为:混合不同大小的微米级“机器人”使它们能够自组织成可以操纵的不同模式当施加磁场时。该技术甚至允许蜂群“笼住”被动物体,然后将其驱逐。
该方法可能有助于了解未来的微型机器人如何执行靶向药物释放,其中一批微型机器人在人体中运输和释放药物产品。
该团队的论文“异构微型机器人集体的可编程自组织”于6月5日发表在美国国家科学院院刊上。
主要作者是StevenCeron博士。'22,他在该论文的共同资深作者KirstinPetersen的实验室工作,他是康奈尔大学工程学院电气与计算机工程系的助理教授兼Aref和ManonLahham教员。
彼得森的集体具身智能实验室一直在研究一系列方法——从算法和经典控制到物理智能——通常通过利用机器人与其环境和彼此之间的交互来诱导大型机器人集体做出智能行为。然而,这种方法在应用于微型技术时非常困难,因为微型技术不足以容纳机载计算。
图片来源:康奈尔大学
为了应对这一挑战,Ceron和Petersen与论文的合著者GauravGardi和MetinSitti(来自德国斯图加特的马克斯普朗克智能系统研究所)合作。Gardi和Sitti专注于开发由磁场驱动的微型系统。
“困难在于如何在一群没有计算、传感或通信手段的机器人中实现有用的行为,”彼得森说。“在我们的上一篇论文中,我们展示了通过使用单一的全局信号,我们可以驱动机器人,进而影响它们的成对交互以产生集体运动,基于接触和非接触的物体操纵。现在我们已经证明我们可以只需将不同大小的微型机器人一起使用,就可以进一步扩展这些行为,从而使它们的成对交互变得不对称。”
在这种情况下,微型机器人是3D打印的聚合物圆盘,每个圆盘的宽度大致相当于人类头发的宽度,溅镀了一层薄薄的铁磁材料,并放置在1.5厘米宽的水池中。
研究人员应用两个正交的外部振荡磁场并调整它们的振幅和频率,使每个微型机器人绕其中心轴旋转并产生自己的气流。这种运动反过来产生了一系列磁力、流体动力和毛细管力。
“通过改变全球磁场,我们可以改变这些力的相对大小,”彼得森说。“这改变了蜂群的整体行为。”
通过使用不同大小的微型机器人,研究人员证明他们可以控制蜂群的自组织水平以及微型机器人如何组装、分散和移动。研究人员能够:将蜂群的整体形状从圆形变为椭圆形;迫使大小相似的微型机器人聚集在一起形成子组;并调整各个微型机器人之间的间距,使蜂群可以集体捕获和驱逐外部物体。
“当系统能够笼养和驱逐时,我们总是感到兴奋的原因是,例如,你可以喝一个装有对人体完全惰性的微型机器人的小瓶,让它们笼养并运输药物,然后将它带到你身体的正确位置并释放它,”彼得森说。“这不是对物体的完美操纵,但在这些微型系统的行为中,我们开始看到与更复杂的机器人有很多相似之处,尽管它们缺乏计算能力,这非常令人兴奋。”
Ceron和Petersen使用蜂群振荡器模型(或swarmalator)来精确描述不同大小的磁盘之间的不对称相互作用如何促成它们的自组织。
既然团队已经证明swarmalator适合这样一个复杂的系统,他们希望该模型也可以用来预测新的和以前看不见的蜂群行为。
“通过swarmalator模型,我们可以抽象出物理相互作用并将它们概括为蜂群振荡器之间的相位相互作用,这意味着我们可以应用这个模型或类似模型来描述不同微型机器人群中的行为,”Ceron说,他目前是一名麻省理工学院博士后研究员。“现在我们可以开发和研究磁性微型机器人的集体行为,并可能使用swarmalator模型来预测这些微型机器人未来设计可能出现的行为。”
“在目前的研究中,我们正在通过微型机器人的大小对所施加的力之间的差异进行编程,但我们仍有很大的参数空间需要探索,”他说。“我希望这是我们利用微型机器人形态的异质性来引发更复杂的集体行为的长期研究中的第一个。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【别克gl8商务车怎么样】别克GL8自推出以来,凭借其出色的舒适性、空间表现和品牌口碑,成为国内高端商务用车...浏览全文>>
-
【别克gl8商务车油耗是多少】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验和较高的...浏览全文>>
-
【别克gl8商务车油耗多少】别克GL8是一款非常受欢迎的中大型MPV,广泛用于商务接待、家庭出行以及出租车等场景...浏览全文>>
-
【别克gl8商务车价格多少】别克GL8作为一款经典的商务车型,凭借其舒适性、空间表现以及品牌口碑,深受企业用...浏览全文>>
-
【别克gl8商务车价格】作为一款在国内市场广受好评的中高端商务车型,别克GL8凭借其宽敞的内部空间、舒适的乘...浏览全文>>
-
【别克gl8商务车多少钱】别克GL8作为一款经典的商务车型,凭借其舒适性、空间表现和品牌口碑,在国内市场上一...浏览全文>>
-
【别克gl8商务车的参数是怎样的】作为一款在商务用车市场中备受青睐的车型,别克GL8凭借其宽敞的空间、舒适的...浏览全文>>
-
【别克gl8商务车参数】作为一款在市场上备受关注的中高端商务车型,别克GL8凭借其宽敞的空间、舒适的驾乘体验...浏览全文>>
-
【别克gl8商务车报价参数配置】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验以及较...浏览全文>>
-
【别克excelle是哪款车】“别克Excelle”这一名称在汽车市场中并不常见,可能是对别克某款车型的误写或翻译差...浏览全文>>